EPFL — PhD Research · 2017 – 2021
Body Segment Fitness for Intuitive Body-Machine Interfaces
IEEE RO-MAN 2022 · 10 citations
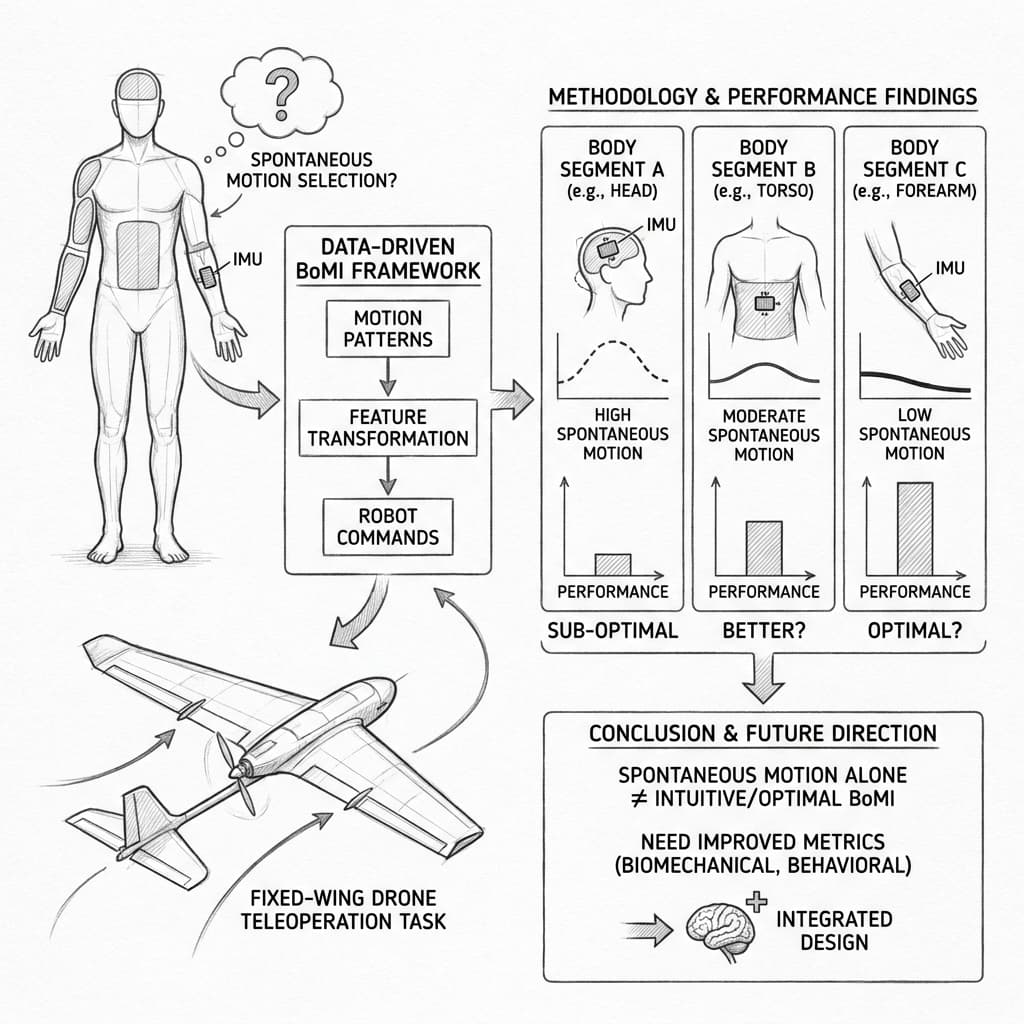
When designing a body-machine interface, the first question is: which part of the body should control the robot? The intuitive answer is to let people use whichever segment they naturally move the most. But is spontaneous motion preference actually a good predictor of teleoperation performance?
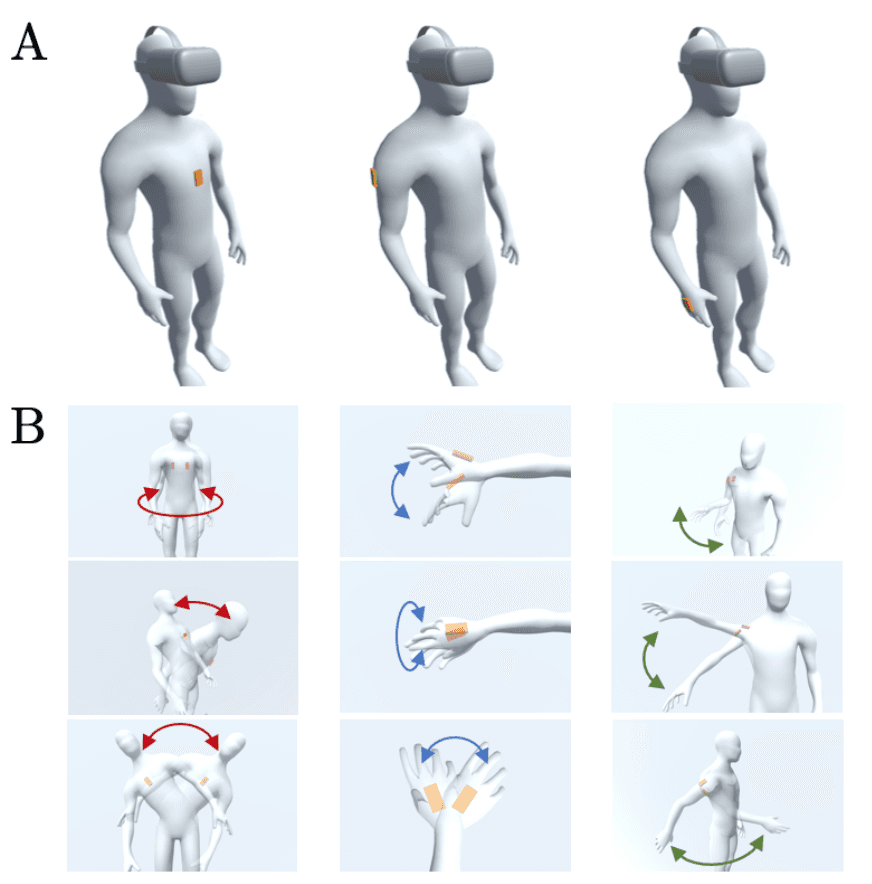
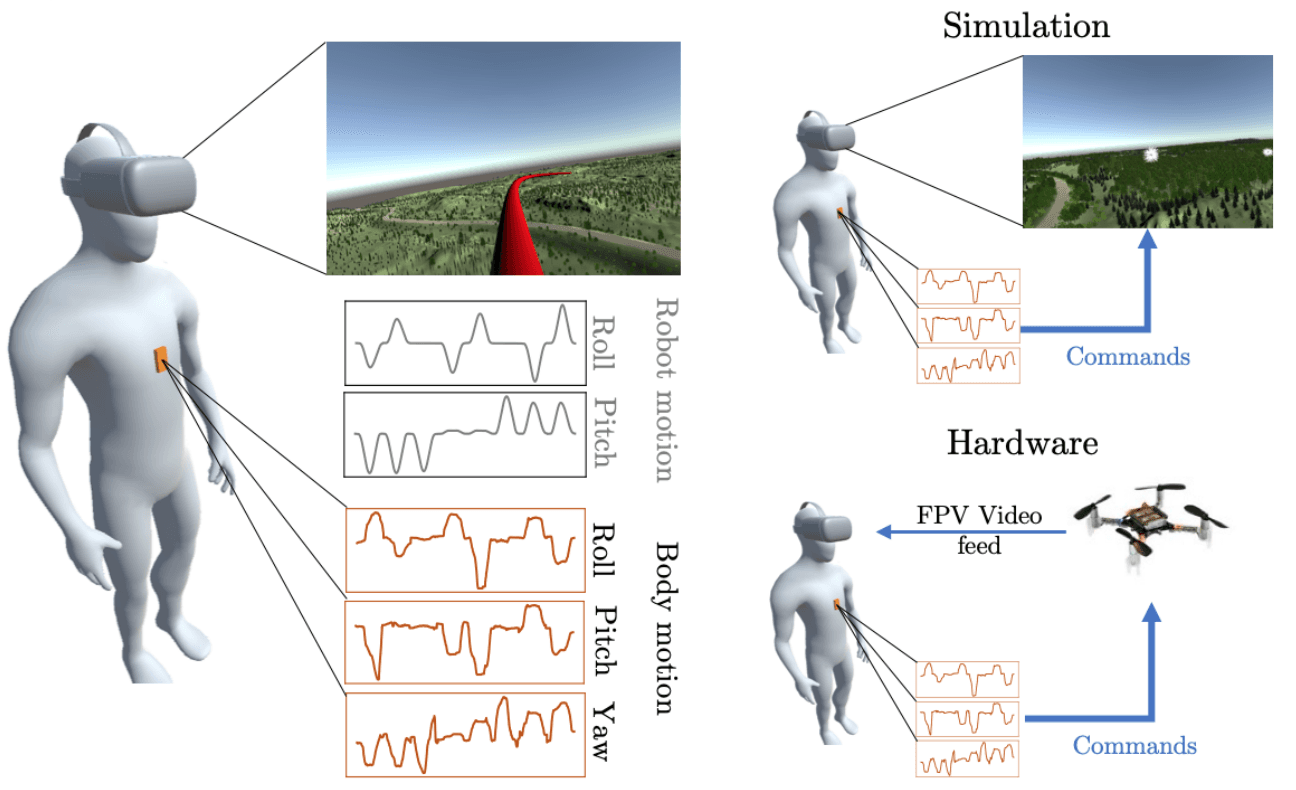
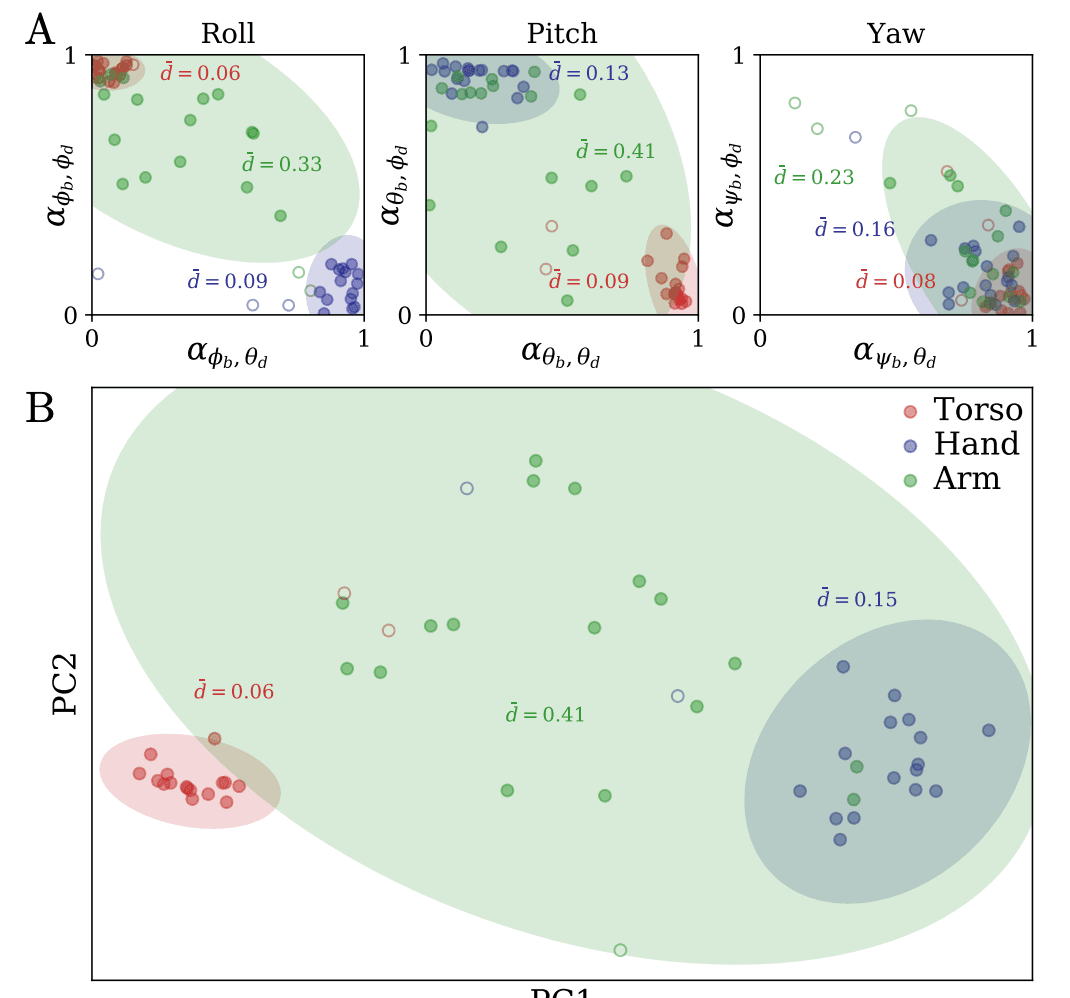
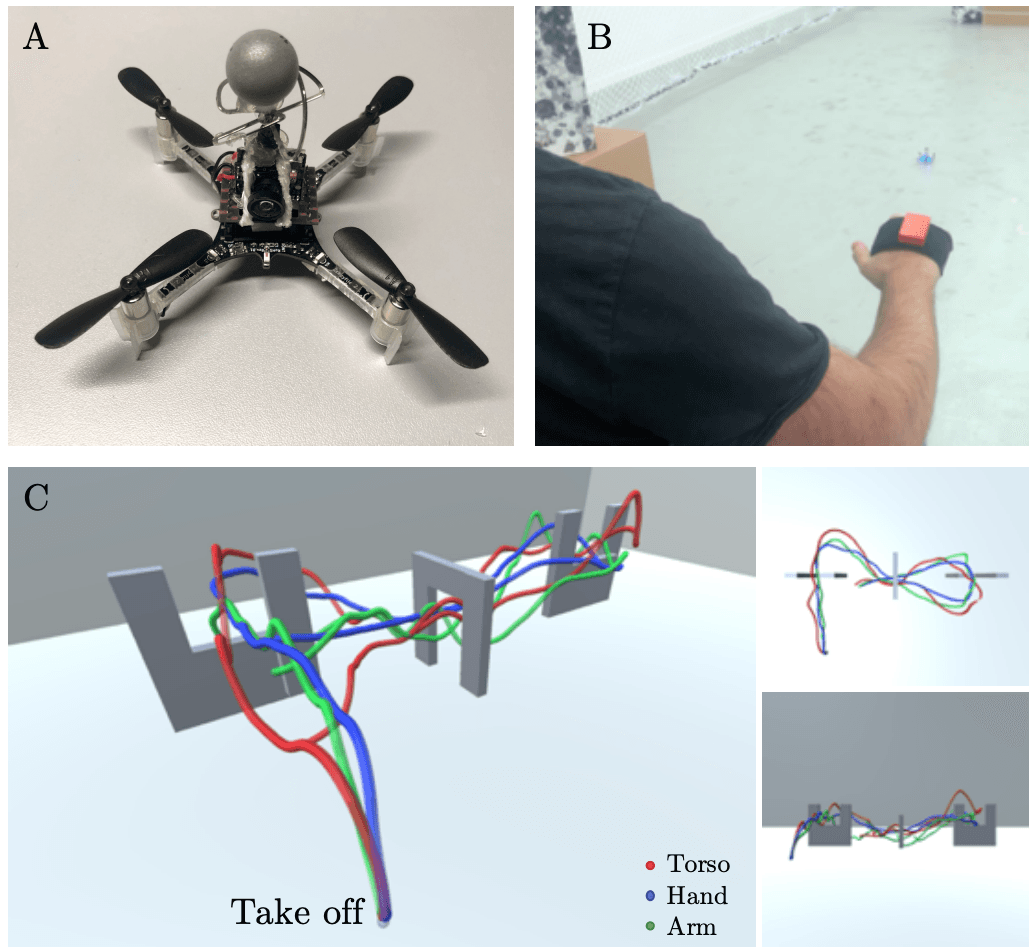
This study tested four body segments — wrist, elbow, shoulder, and torso — as control inputs for fixed-wing drone teleoperation. Participants wore IMU sensors on each segment and completed a standardised flight task using each mapping, allowing a direct within-subject comparison of performance across segments.
The results challenged the intuition: the segment a person tends to move most spontaneously does not reliably lead to the best control performance. Some segments offered more precise and stable control despite feeling less natural. The findings suggest that interface designers should rely on objective performance metrics during calibration, not just motion preference — and informed the personalisation framework developed in later work. Published at IEEE RO-MAN 2022.