This website — just like everything else — is Work in Progress

Matteo Macchini
About Me
Hello stranger! I am Matteo — engineer, AI researcher, recovering roboticist, and body language nerd. I build end-to-end machine learning systems that understand and model human behavior — from sensor data and model training to on-device deployment — spanning robotics, human-machine interaction, and digital humans.
My path started at CERN, designing motion control systems for particle beam diagnostics. I then spent four years at EPFL researching body-machine interfaces for robot teleoperation — work cited over 200 times and recognised with the Best PhD Thesis award in 2021. Now I lead human understanding and avatar systems at Magic Leap, bringing real-time human presence into mixed reality.
Skills & Tools
AI & Machine Learning
Vision & Perception
XR & Digital Humans
Languages
Languages
Italian
Native
English
Fluent
French
Fluent
German
Basic
Let's be in touch!
Experience
Staff ML/AI Engineer — Digital Humans
Sep 2024 — PresentMagic Leap · Zurich, CH
Embedded collaboration (TVC) with a leading technology partner on XR initiatives
- Leading AI/XR initiatives focused on avatars, embodied agents, and body tracking for XR headsets and glasses.
- Shipped prototype systems integrating perception, Gemini, and full-body tracking, including an official public Android XR Unity sample showcasing avatars.
- Driving research and production efforts in pose estimation, sensor fusion, and generative AI.
Staff ML/AI Engineer — Digital Humans
Sep 2021 — PresentMagic Leap · Zurich, CH
- Led a 5-engineer team to deliver the core ML2 Avatars system for collaborative XR experiences.
- Contributed to defining the strategic direction and roadmap for the Avatars initiative with leadership.
- Led end-to-end development of AI/ML systems including hand pose classification and action recognition.
- Productized key AI/ML technologies into company-wide platform capabilities for ML2.
- Owned the Avatar software stack across Unity/C#, networking, animation, and data collection pipelines.
- Mentored interns and drove alignment across research, engineering, product, and design teams.
Doctoral Researcher — ML for Human-Robot Interaction
Jul 2017 — Sep 2021EPFL · Lausanne, CH
- Developed state-of-the-art machine learning methods for body motion data processing.
- Published 7 first-author peer-reviewed papers in top-tier journals and international conferences.
- Teaching assistant in 6 master courses including aerial and mobile robotics, machine learning.
- Supervised 25+ student projects and coordinated multi-institution research collaborations.
- Co-authored 2 successful grant proposals in collaboration with international academic and industrial partners.
- Initiated 3 international collaborations with top universities across Europe.
Data Analyst & Lab Coordinator
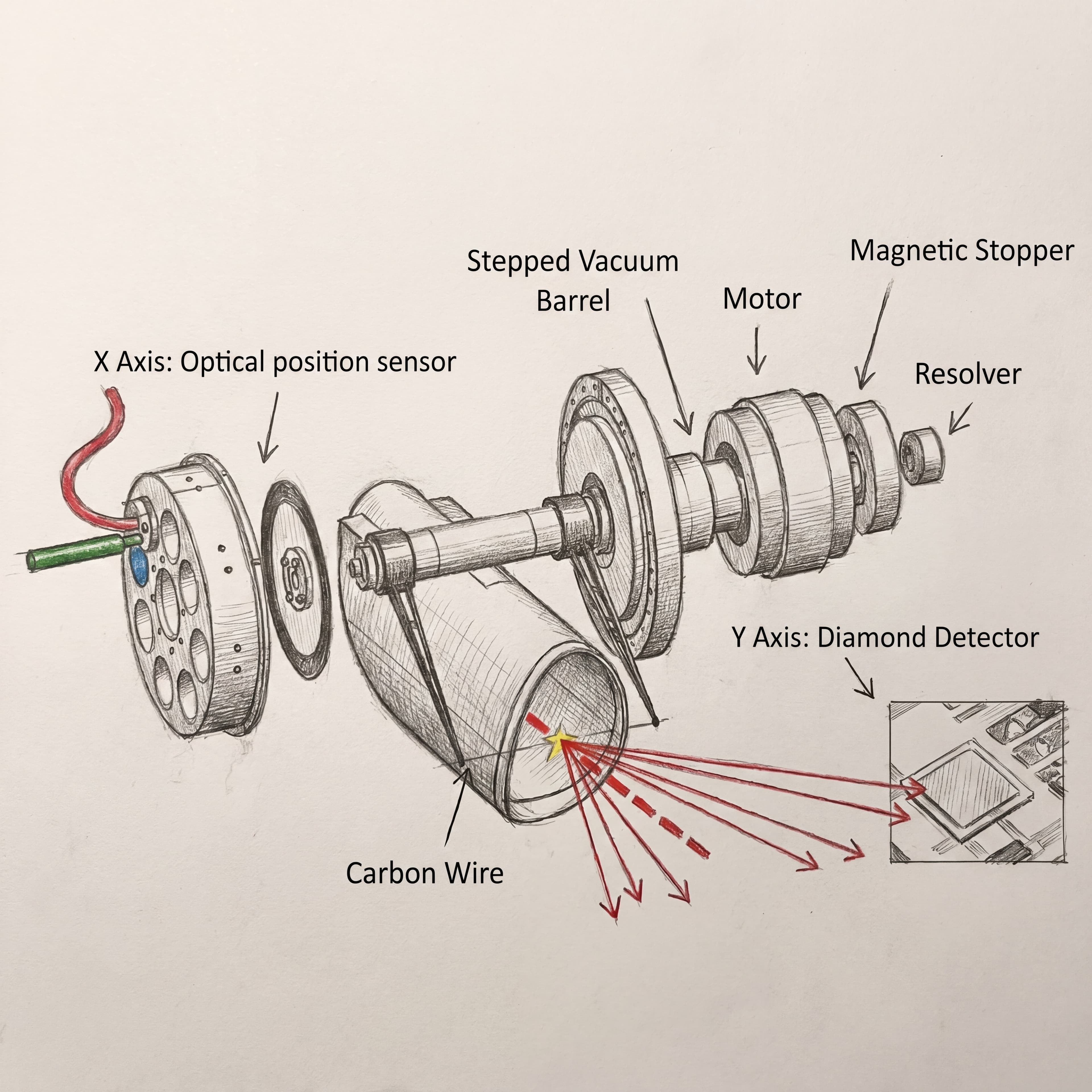
Jul 2015 — Sep 2017CERN · Geneva, CH
- Led development of an automated data analysis software for superconducting wire diagnostics.
- Responsible for experiment scheduling based on data analysis.
- Increased laboratory efficiency by introducing automated experiments and improved diagnostics.
- Commissioned, tested, and installed 6 industrial furnaces.
- Designed and implemented the corresponding acquisition and control system in LabVIEW.
Projects
Magic Leap · XR Partnership
2024 – Present


Magic Leap
2021 – 2024




EPFL
2017 – 2021

Fly Jacket
IEEE RA-L 2019
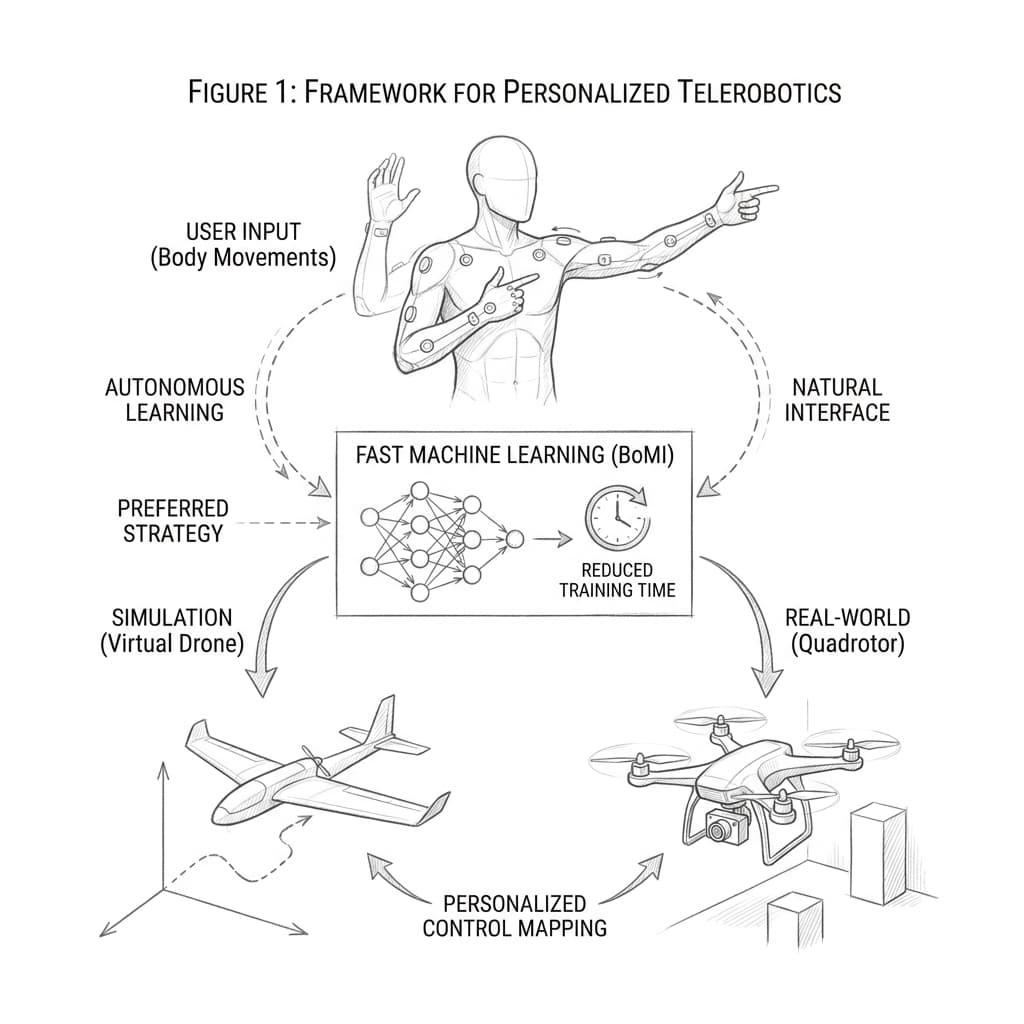
Personalized Telerobotics via Fast Machine Learning
IEEE ICRA 2020
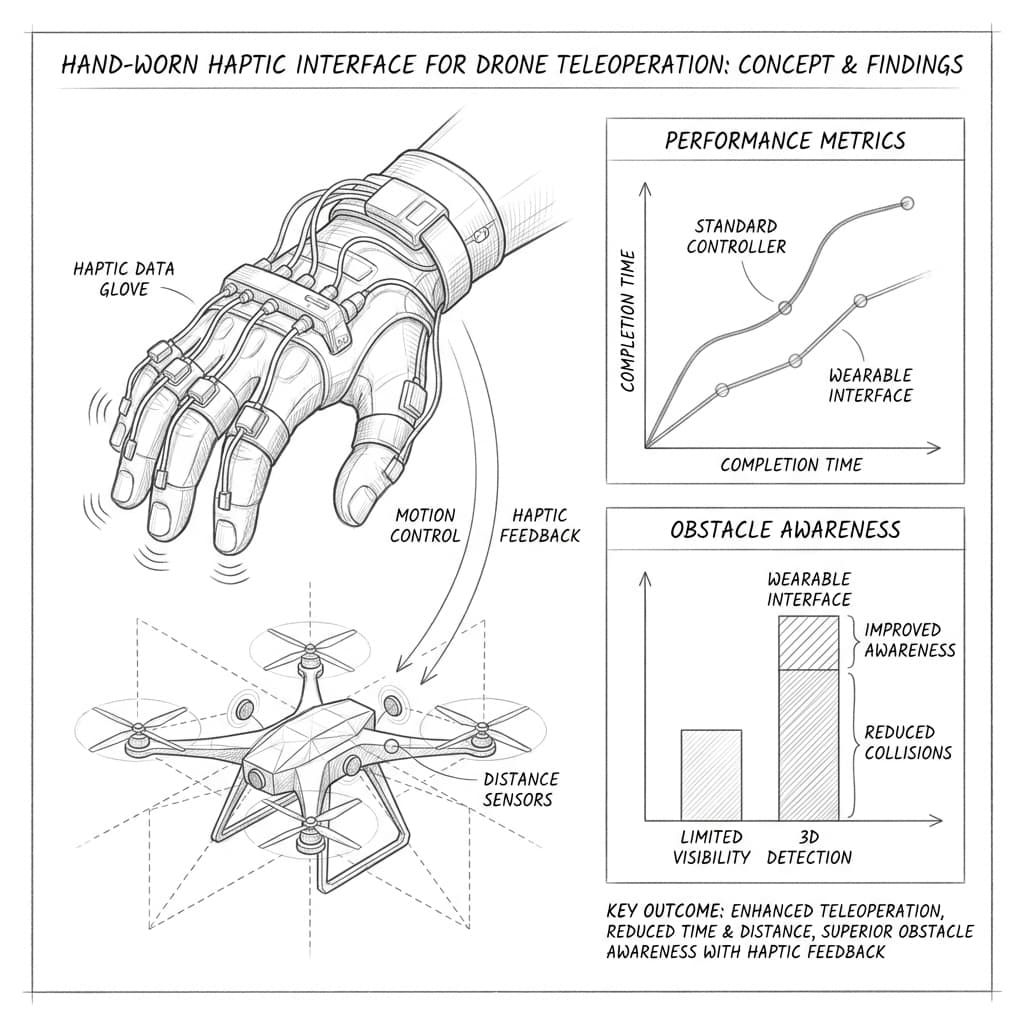
Hand-worn Haptic Interface for Drone Teleoperation
IEEE RA-L 2021
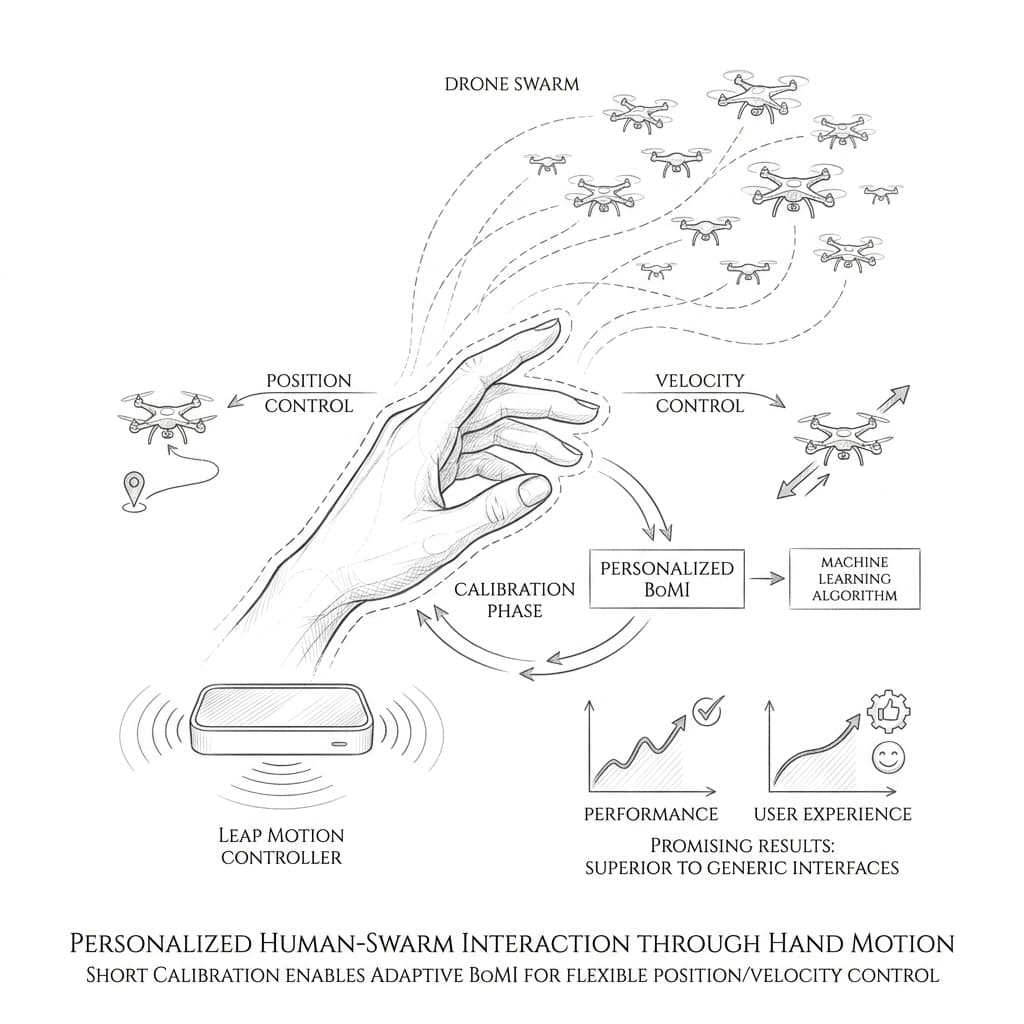
Personalized Human-Swarm Interaction
IEEE VR 2021
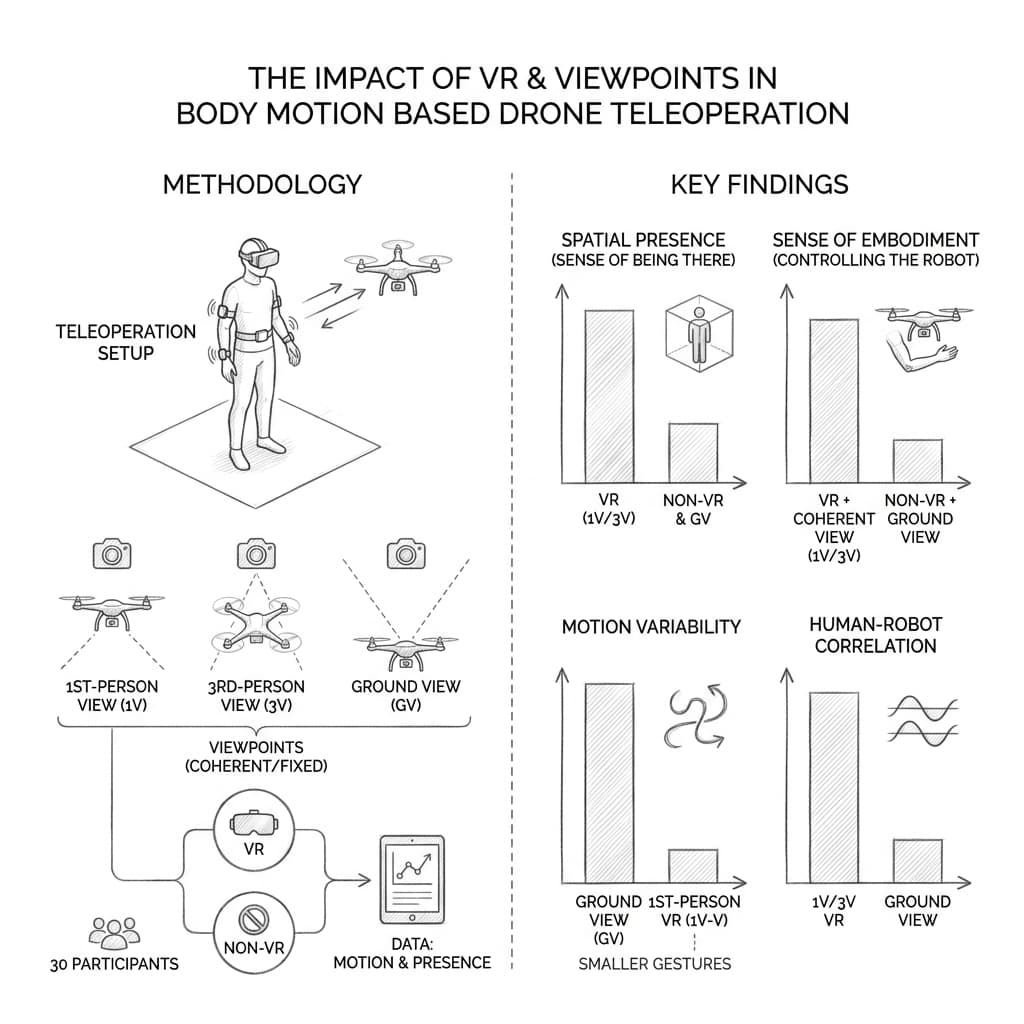
Impact of VR and Viewpoints in Drone Teleoperation
IEEE RA-L 2021
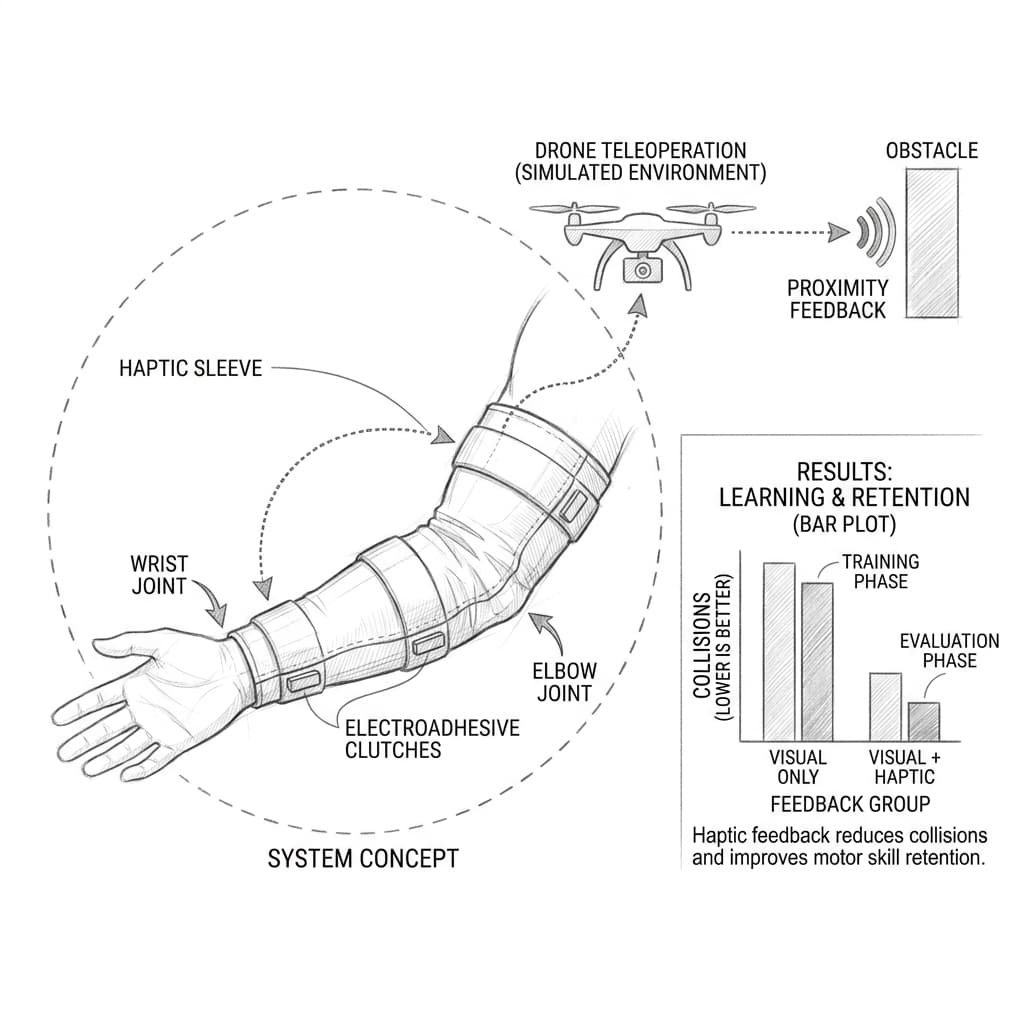
Arm-Wrist Haptic Sleeve for Drone Teleoperation
IEEE RO-MAN 2022
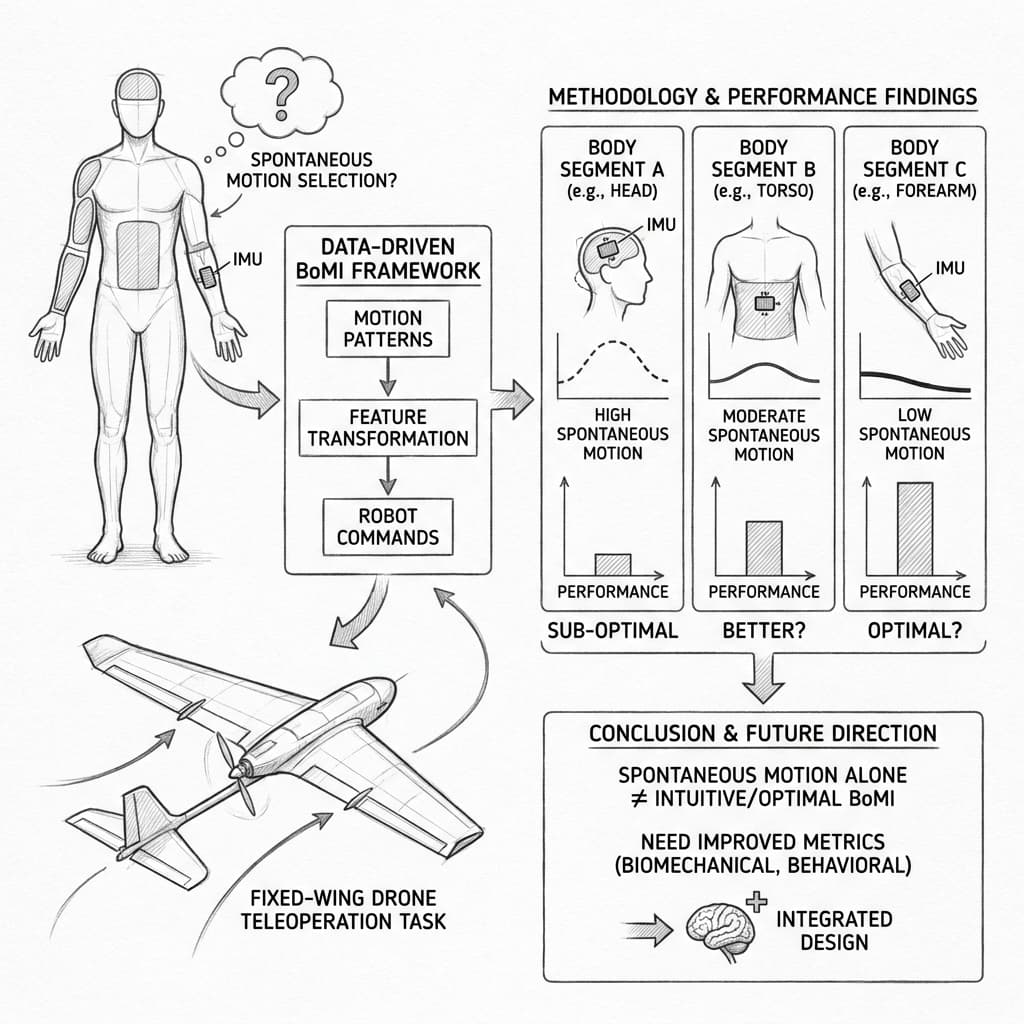
Body Segment Fitness for Intuitive Body-Machine Interfaces
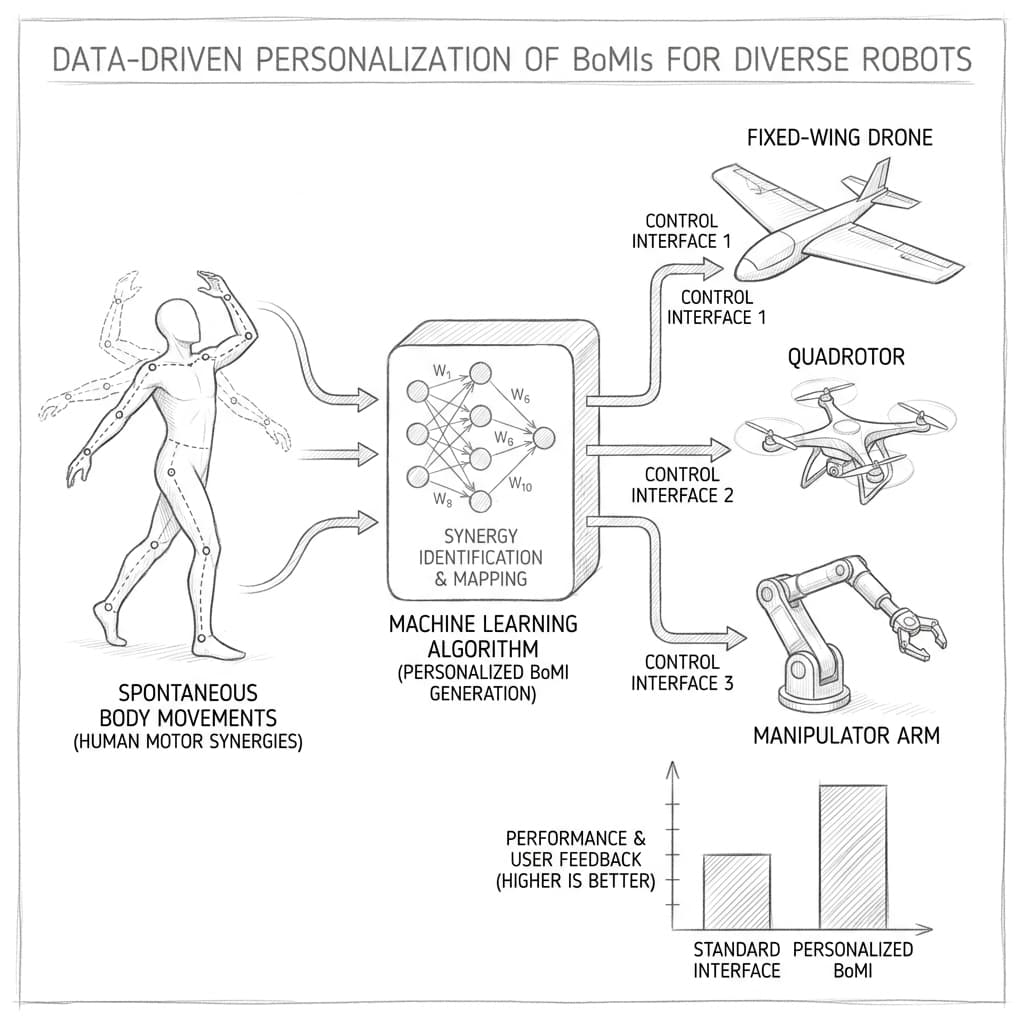
IEEE Trans. SMC 2024
Data-Driven Personalization for Diverse Robot Types
Selected Papers
Full list on Google Scholar ↗- 2025“Efficient Egocentric Action Recognition with Multimodal Data.” EgoVis @ CVPR 2025
M. Calzavara, A. Kastrati, M. Macchini, D. Vasilevski, R. Wattenhofer
Full paper in preparation - -“Online Adaptation of Body-Machine Interfaces Based on Classification of Body Motion Patterns.” IEEE Trans. SMC · In Review
M. Macchini, Y. Belal, A. Giusti, G. Abbate, M. Tognon, F. Schiano, R. Siegwart, and D. Floreano - 2024“Data-Driven Personalization of Body-Machine Interfaces to Control Diverse Robot Types.” IEEE Trans. SMC
M. Macchini, F. Schiano, and D. Floreano - 2021“Does spontaneous motion lead to intuitive Body-Machine Interfaces? A fitness study of different body segments for wearable telerobotics.” IEEE RO-MAN
M. Macchini, J. Frogg, F. Schiano, and D. Floreano - “Arm-Wrist Haptic Sleeve for Drone Teleoperation.” IEEE RA-L
V. Ramachandran, M. Macchini, and D. Floreano - “Personalized Human-Swarm Interaction through Hand Motion.” IEEE RA-L
M. Macchini, L. De Matteïs, F. Schiano, and D. Floreano - “The Impact of Virtual Reality and Viewpoints in Body Motion Based Drone Teleoperation.” IEEE VR
M. Macchini, M. Lortkipanidze, F. Schiano, and D. Floreano - 2020“Hand-worn Haptic Interface for Drone Teleoperation.” IEEE ICRA
M. Macchini, T. Havy, A. Weber, F. Schiano, and D. Floreano - 2019“Personalized Telerobotics by Fast Machine Learning of Body-Machine Interfaces.” IEEE RA-L
M. Macchini, F. Schiano, and D. Floreano - 2017“Design and validation methodology of the control system for a particle beam size measurement instrument at the CERN laboratory.” ACC
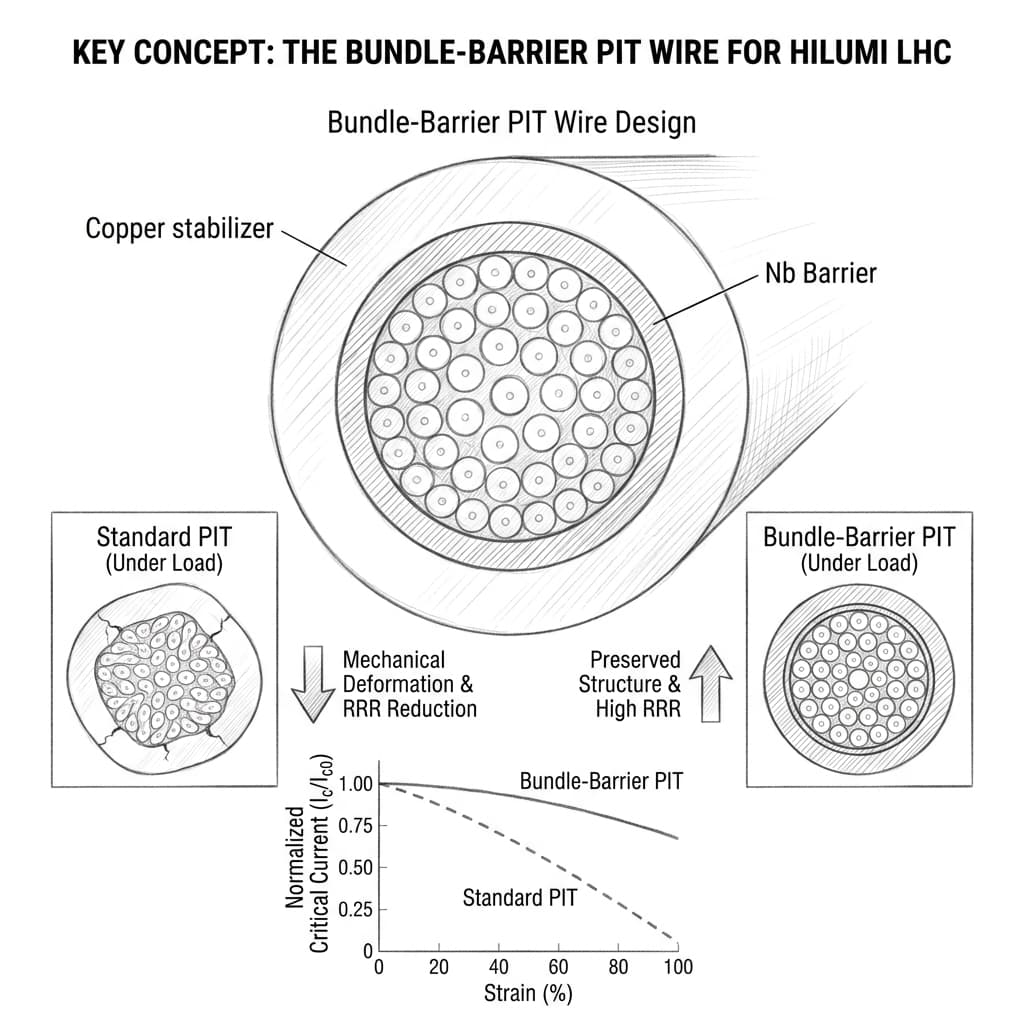
J. Emery, A. Barjau, B. Dehning, J. Herranz Alvarez, P. Lapray, and M. Macchini - 2016“The bundle-barrier PIT wire developed for the HiLumi LHC project.” IEEE Trans. Appl. Supercond.
B. Bordini, A. Ballarino, M. Macchini, D. Richter, B. Sailer, M. Thoener, and K. Schlenga
Oral Presentations & Invited Talks
- Open Science in Practice — “Body Motion as data source for Telerobotics.”
- Humans in Motion 2018 — “Drone piloting through Body Motion.”
- ICRA 2020 — “Hand-worn Haptic Interface for Drone Teleoperation.”
- IEEE VR 2021 — “The Impact of Virtual Reality and Viewpoints in Body Motion Based Drone Teleoperation.”
- IEEE Neuro-EMBS 2021 — “Personalized Body-Machine Interfaces for Advanced Human-Robot Interaction.”