EPFL — PhD Research · 2017 – 2021
Arm-Wrist Haptic Sleeve for Drone Teleoperation
IEEE RA-L 2021 · 13 citations
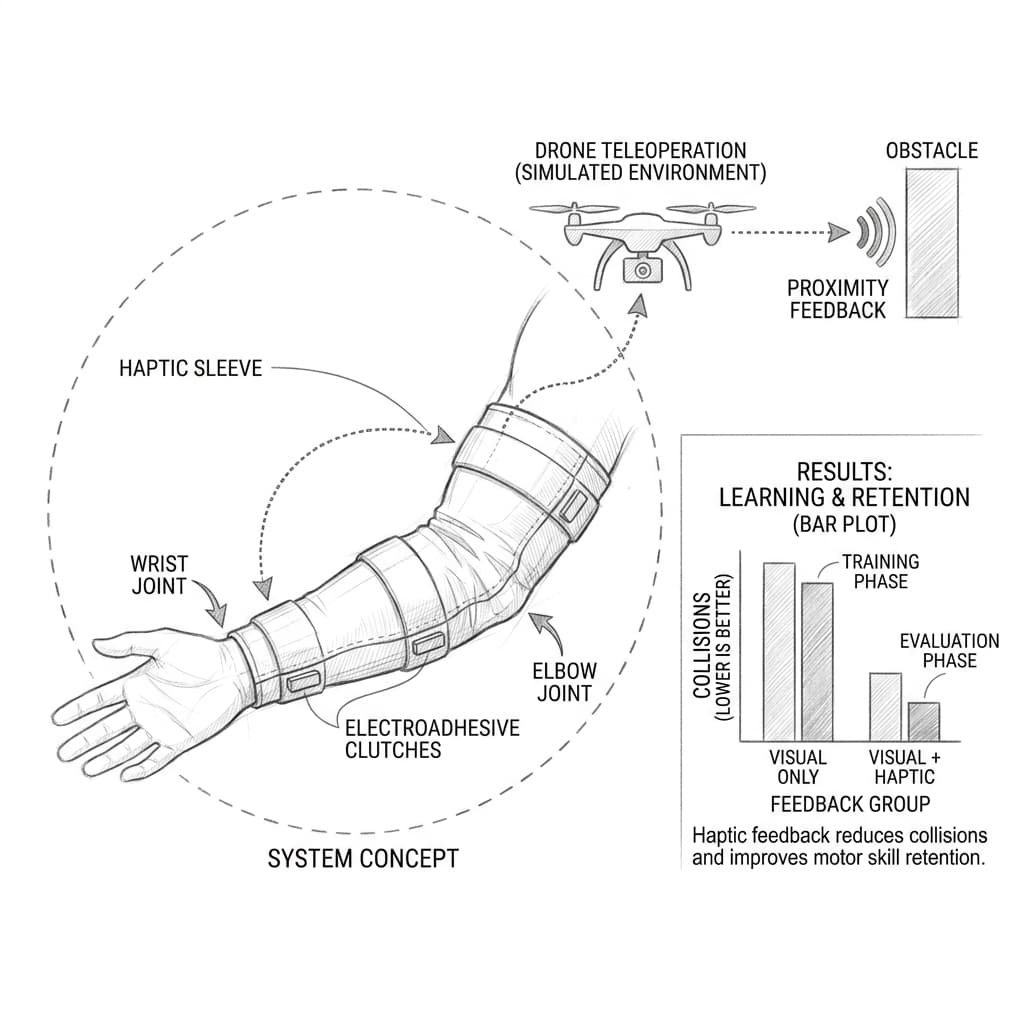



Most haptic feedback systems for teleoperation tell you something is wrong — a vibration, a sound, a visual alert. But what if the interface could physically prevent you from making the wrong move? This project explored a more direct form of haptic guidance: a wearable sleeve that temporarily restricts arm motion when the drone is about to collide with an obstacle.
The sleeve uses electroadhesive pads that stiffen on demand, creating a physical resistance against forearm movement in the direction of danger. Unlike vibrotactile feedback, this approach acts on the motor system directly — it doesn't just warn you, it guides you. The challenge was designing a control law that applies resistance smoothly and proportionally to proximity, without being so intrusive that it disrupts natural piloting.
In a blind obstacle avoidance experiment — where participants could not see the drone's environment — the sleeve reduced collision errors by 23.5% compared to flying without feedback. Participants also reported lower perceived workload and faster adaptation. The work was published in IEEE Robotics and Automation Letters and has been cited over 10 times.