EPFL — PhD Research · 2017 – 2021
Hand-worn Haptic Interface for Drone Teleoperation
IEEE ICRA 2020 · 54 citations
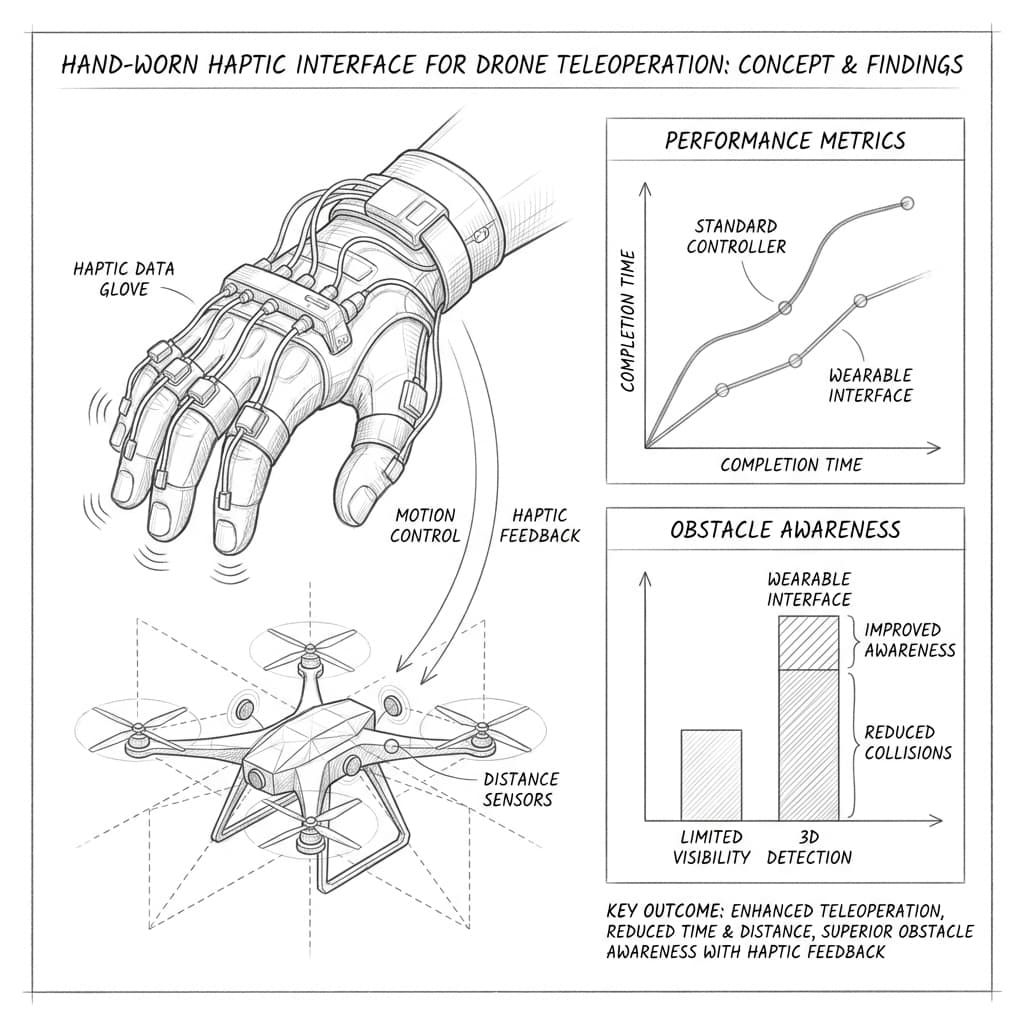




Flying a drone with your hands feels natural — until you lose situational awareness. Without physical feedback, pilots must rely entirely on visual cues to sense proximity to obstacles, which is slow and cognitively exhausting. The question was: can haptic feedback close that loop, and can a glove make it wearable?
I designed and built a hand-worn haptic interface that does both. The glove captures continuous hand and wrist orientation through embedded IMUs and maps it directly to drone flight commands — no joystick, no controller. At the same time, vibrotactile actuators in the glove alert the pilot to nearby obstacles in real time, with intensity scaled to proximity.
The system was validated with 36 participants across two environments — a physics simulation and a real indoor flight arena. Haptic feedback measurably reduced collision rates and mental workload, while the hand-motion control scheme proved accessible to first-time pilots with minimal training. The work was presented at IEEE ICRA 2020 and has been cited over 50 times.