EPFL — PhD Research · 2017 – 2021
Data-Driven Personalization for Diverse Robot Types
IEEE Trans. SMC 2024
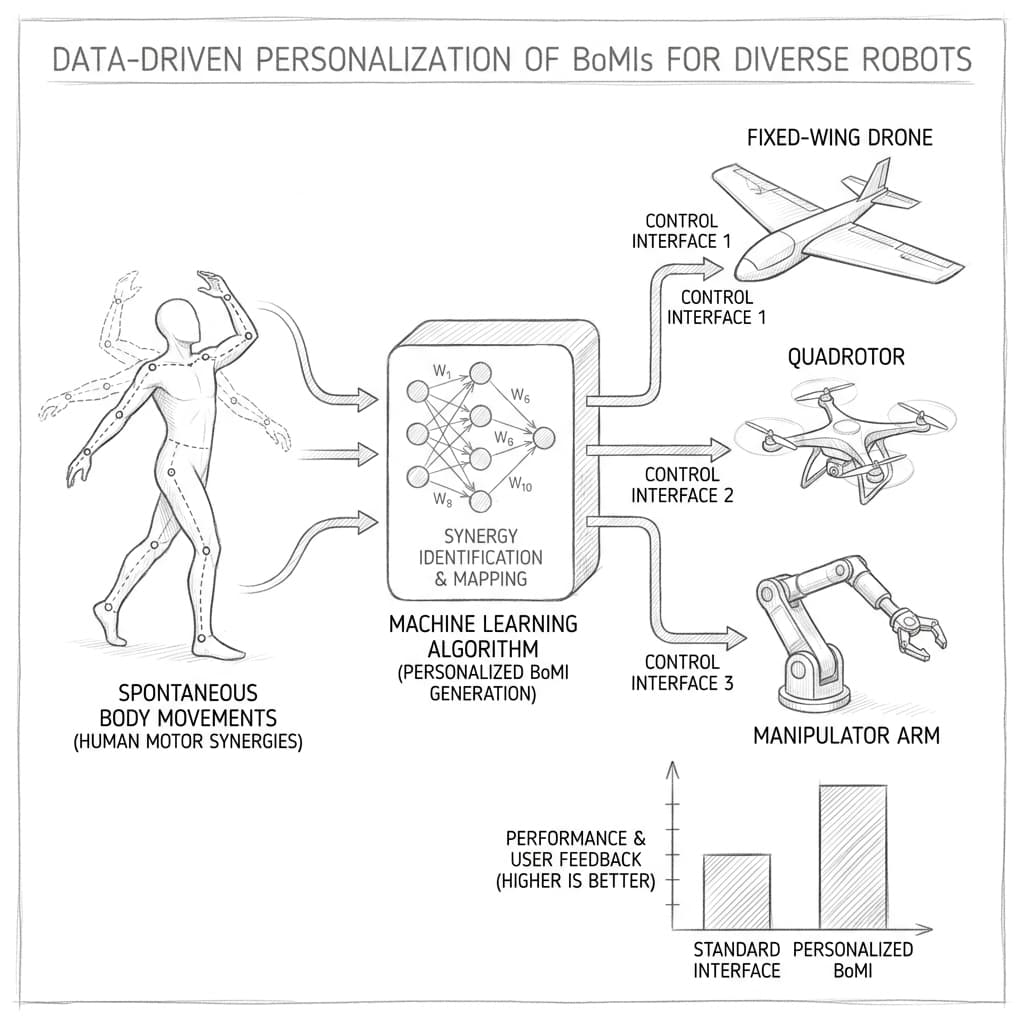
The body-machine interface framework developed throughout the PhD was built around drone teleoperation. But would it transfer to robots with fundamentally different morphologies — a robotic arm, a fixed-wing aircraft, a ground vehicle? Generalising personalised interfaces across robot types was the final and most ambitious step.
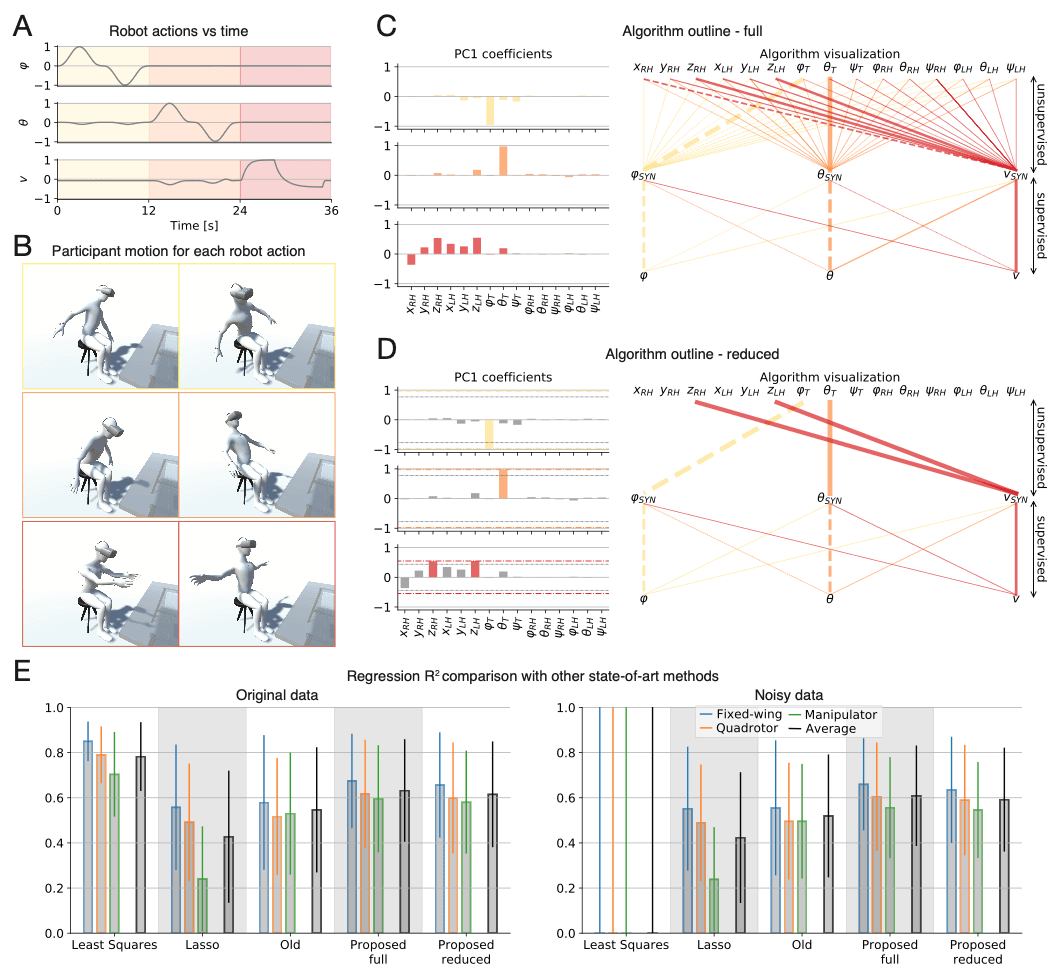
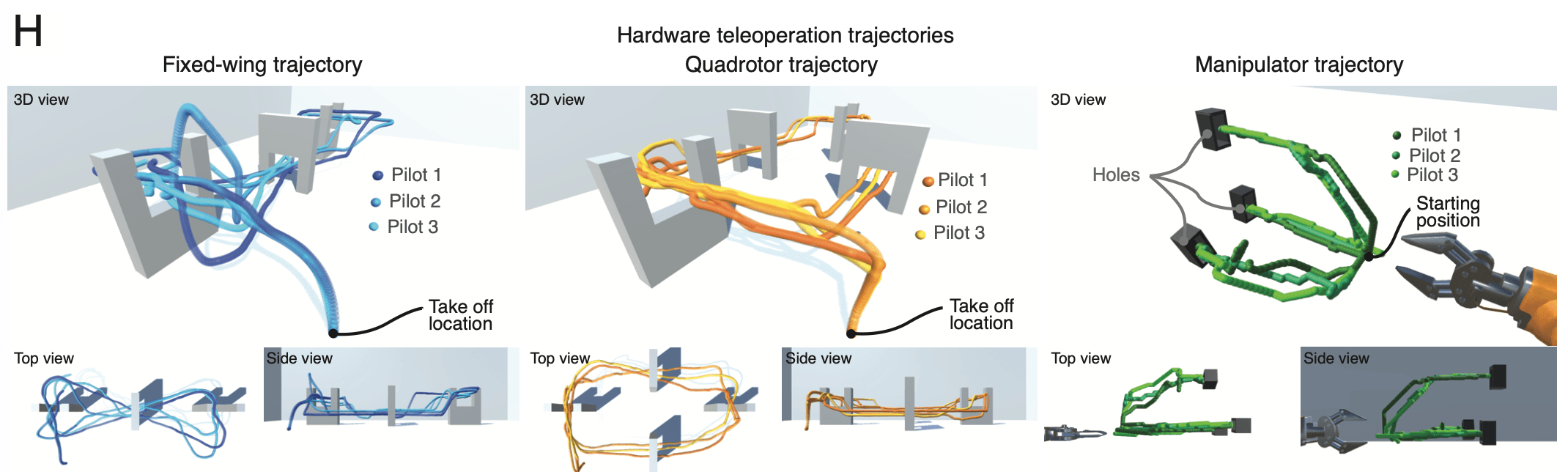
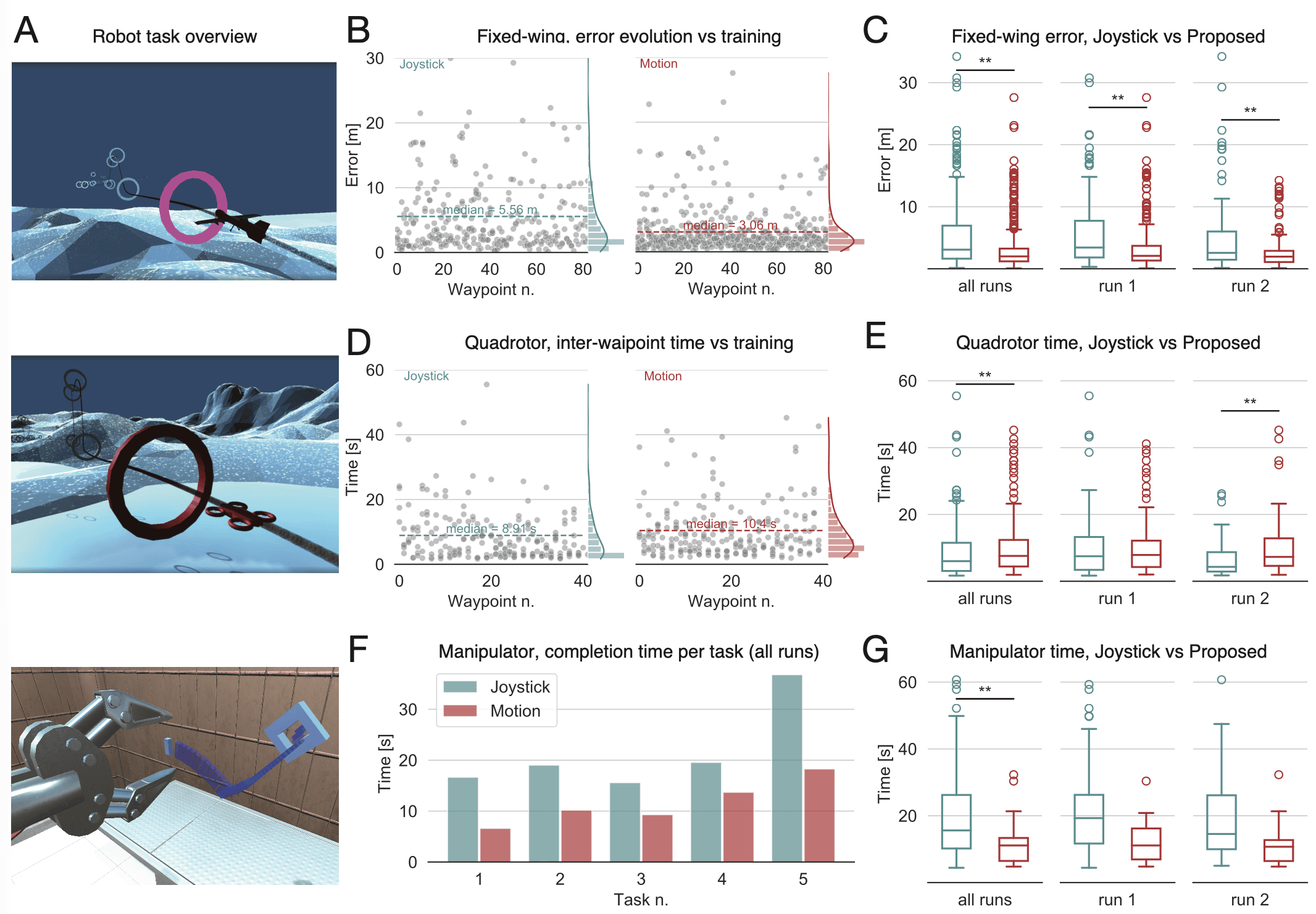
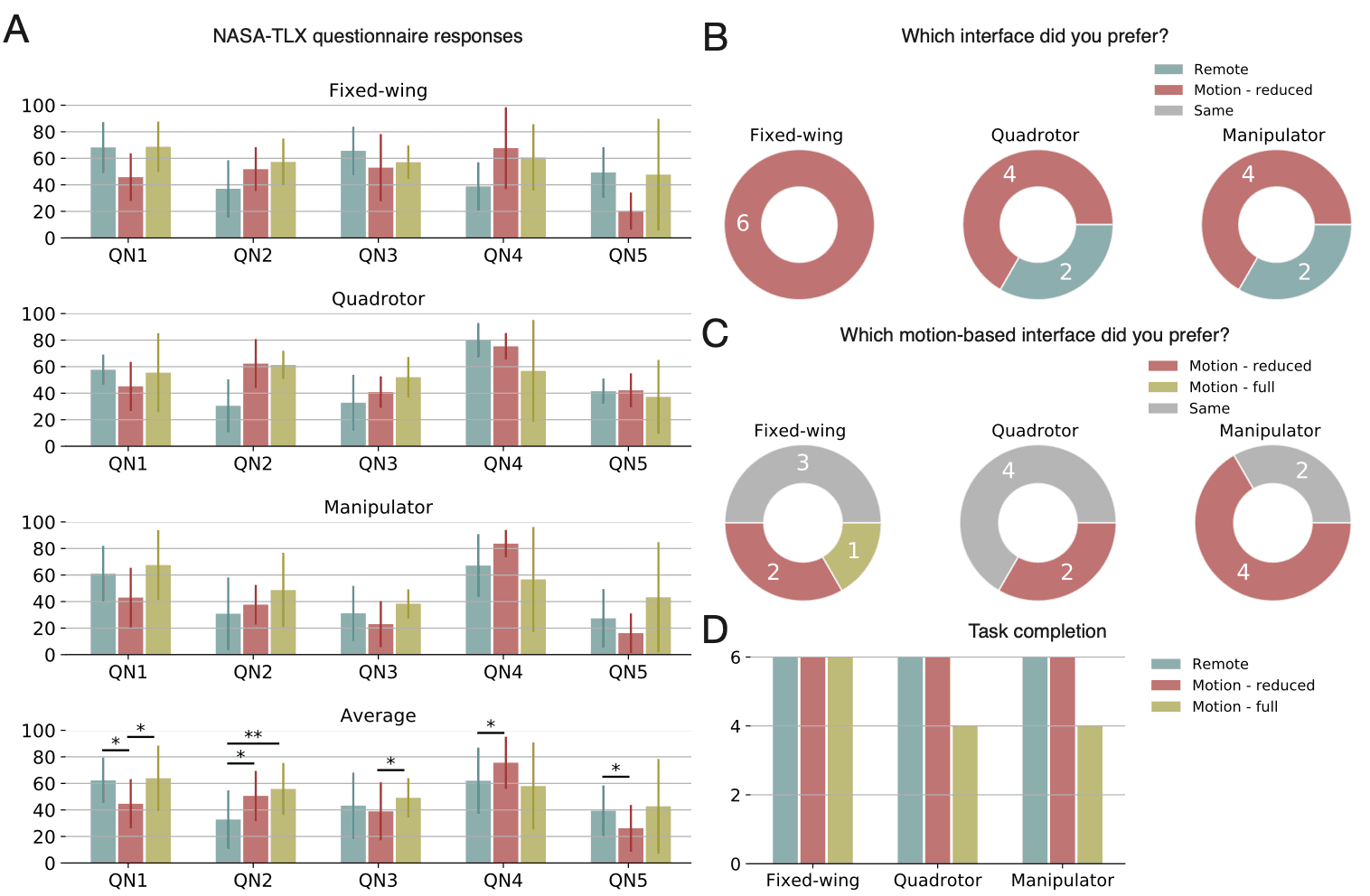
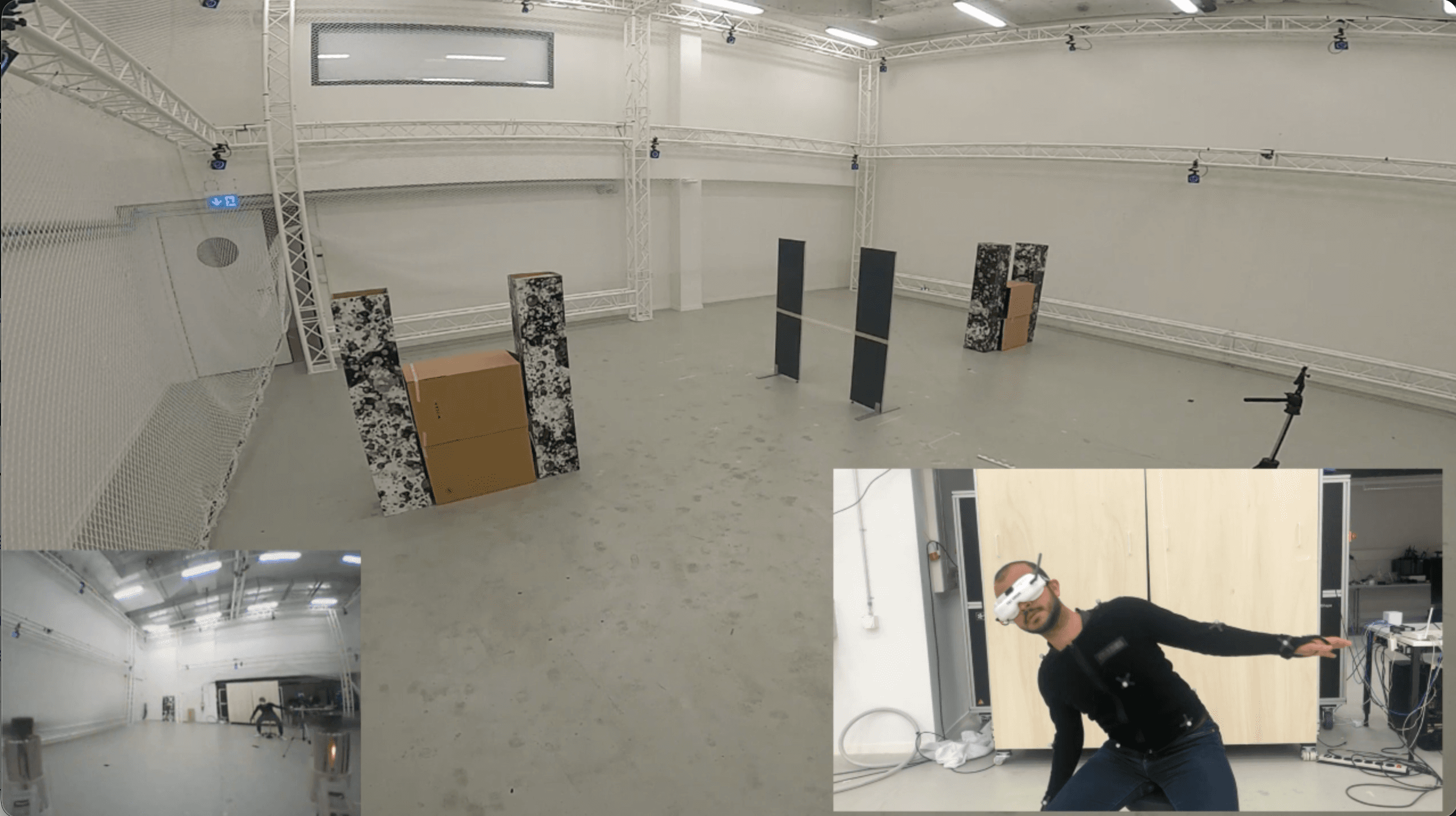
This work extended the BoMI framework to three distinct robot morphologies: a fixed-wing drone, a quadrotor, and a robotic arm. Rather than designing separate mappings for each robot, the system captures individual motor synergies — the personal movement patterns each user naturally produces — and learns how to translate them into robot-specific control commands through a unified data-driven pipeline.
The same short calibration procedure adapts to each new robot, with no manual re-engineering of the mapping. Across all three morphologies, personalised interfaces outperformed generic baselines in task performance and perceived ease of control. The work consolidates the full PhD research program and was published in IEEE Transactions on Systems, Man, and Cybernetics in 2024.